DP Questions with Claims #8

Important feedback of the previous post
-
Notice what is wrong! Don’t blindly try to give examples
To drive home the point, what do I mean by an independent test of a claim? It’s like removing their proposed answer from the claim and filling the blank yourself. “Most people reach their peak in their middle age” becomes “most people reach their peak in __”. Now, you go look at most people and check when they reach their peak and you fill in the blank yourself. Then, you compare the two answers. If they don’t match, either the claim is wrong or your example or reasoning is faulty. Either way you get the valuable information that something is amiss. Otherwise, if you just read it as “most people reach their peak in middle age”, you won’t notice if something is wrong.
-
one vs many valid examples
What examples could you have come up with for improving over decades? Sachin. Rahman. Dhoni. Mani Ratnam? Superstar? Harris Jayaraj?! Note that a counter-example doesn’t falsify the claim because it says you can improve, not you will improve over decades. So, you just need one valid example.
Mission #8
Mission #8: Your mission, should you choose to accept it, is to identify the question and answer in each claim, come up with an example for the question, fill-in-the-blank for the answer yourself, and compare to the claimed answer.
For example,
On one hand, the presence of reaction forces acting in the direction of the constraint generally renders the equilibrium description more complex, since those unknown forces must be determined along the entire trajectory such that kinematical constraints are satisfied.
becomes
On one hand, the presence of reaction forces acting in the direction of the constraint generally renders the equilibrium description __, since those unknown forces must be determined along the entire trajectory such that kinematical constraints are satisfied.
Until you can fill in the blank yourself, you don’t really “understand” the statement.
(You can ignore “because” statements for now.)
Take on passages that you are confused about. That way, you will know that the technique worked because things will be clear afterwards. What do you want to “think critically” about?
Please do let me know when you are back. Good luck to you. As always please don’t give up on me.
I can’t give up on people who put in the hard work. “Sometimes people deserve to have their faith rewarded.”
Multiple variable regression (8)
Source: Part of the Regression covered here
C&Q:
(Omitting variables)[A] results in (bias in the coefficients of interest)[B] - unless (their regressors are uncorrelated with the omitted ones)[C].
Claim: [A] results in [B] if [C] is false.
Question: [A] results in __ if [C] is false
Example:
Let’s take the following data as an example:
n = 10000
x1 = rnorm(n); x2 = 1 * x1 + rnorm(n);
Let y=x1+x2. The goal with linear regression (lm) is to find the
coefficient of x1; given y, x2 and x2 data.
For A, we think of omitting x2. Instead of lm(y~x1+x2), we
do lm(y~x1), to determine the coefficient of x1.
For B: The actual slope of x1 is 1 (y=x1+x2), but when you omit x2,
you get a higher value for the slope of x2 (2.019), i.e., BIAS.
lm(y~x1) # not including x2 in the model
x1
2.01945683
lm(y~x1+x2) # including x1 and x2 in the model
x1 x2
1.0074283 1.0104000
[C]–> unless their (regressors)[4] are (uncorrelated)[5] with the (omitted ones)[6]
In the above case the regressors (x1) show a correlation of 0.7 with the omitted regressor (x2).
If the regressors are uncorrelated (x1=rnorm(n), x2=rnorm(n))
i.e., x1 and x2 show a correlation of 0.02, then case [A] results in
NO [B] as [C] is True. As observed below there is no bias as the
coefficients when including and excluding x2 is the same.
lm(y~x1) # not including x2 in the model
x1
0.97783187
lm(y~x1+x2) # including x1 and x2 in the model
x1 x2
1.00455357 0.99684880
C&Q:
(This)[A] is why we (randomize treatments)[B], (it)[B] attempts to (uncorrelate)[C] our (treatment indicator with variables that we don’t have to put in the model)[D].
Claims: (Avoiding Biases in the coefficients of the regressor)[A] is why we do [B]
Question: When we do [B], we end up with __
Example: * I tried creating a population with 2 correlated variables (introducing bias). I then randomly selected 100 of them. There still was bias (there was still correlation).*
I guess I don’t understand what it means to randomize treatments or of course the claim is wrong.
Career Research - Analysis (23)
Source: From the Summary I wrote for my career analysis.
C&Q:
(An excel sheet)[1] has been created pooling in all the (data computed above)[2] of (more than a dozen career options to choose from)[3].
Claim: [1] has been created with [2] consisting of [3]
Question: [1] has been created with __ consisting of [3].
Example:
In the excel sheet, we look in the ‘personal fit’ tab. ‘Entering DS from DE’ is chanced at 95%. This is the exact number found in the essay under ‘Data Science’ section, within the ‘personal fit’ subsection. This excel sheet contains data for Management Consulting, Software Engineering, Economics PhD and many more.
I am sticking to one running example per claim or per chosen sentence. It is hard to focus on the whole paragraph at once and find one example that will fit all. Only when I go to the next sentence I know what I am missing, so I need a new example.
C&Q:
(Similar data)[1] is also available within the (80k-hours-career-guide)[2], but that does not allow (as much detail)[3] in comparison.
Claim [1] is also available at [2] but not with [3]
Question: [1] is also available at __ but not with [3]
If you look at the excel sheet, you will see that there are options for number of lives saved if I move to the US, or if I stay in Netherlands. Such detail is not available in the 80k-hours-career-guide.
C&Q:
(Support conditions)[1] wise (IB and the like)[2], (seems like a reject)[3].
Claims: Considering [1], [2] is to be rejected.
Question: Considering [1], [2] is to be __
Example:
For 1, we think of abnormal working hours (80 hrs/week) and working 28 days a month, continuously.
For 2, we think of Investment Banking, Trading.
For 3, I think of not taking up jobs in IB due to the fear of burning out?
How do you test “seems like”? how do you test “opinions?” At this point it’s more like personal choice, I am not even sure an example can be given
C&Q:
I am (quite afraid)[4] of the (extremely long hours)[5], (the need to facetime)[6], the (lack of attention to health)[7] etc…
Claims: IB has [5]
Question: IB has __ hours for work/week?
Example: IBer’s work from 70 to 100 hrs per week, this means 10 to 14 hrs for 7 days a week.
Claims: IB forces you into [6]
Question: IB __ facetime
Example: “My group is ~15 people. I have to be at my desk all the time. If my associates / VPs call me the first thing they ask is “are you in the office” even if it is a weekend. They call me in on weekends when they are there just in case work comes up they want me to be accessible. I can never leave before anyone more senior that me or I get a staffing email the next day because they assume I am not working on anything / I am not busy.” — wallstreet oasis forum.
Claims: IB results in [7]
Question: IB results in __ to health
Example “Constant heart palpitations due to caffeine/energy drinks/stress Carpal tunnel / tendinitis. Lost a lot of hair. Put on 25 lbs or more (fat, not muscle). Stress lowered my immune response to the point that I got a serious infection that landed me in the hospital (it started out small but spread to my veins). Became borderline alcoholic (was having 4-5 drinks every day after work, sometimes before work although not that often)”, within 3 years of working in IB. — testimony of an IBer on wallstreet oasis forum
For [7], we think of stress eating junk food or avoiding food altogether to meet deadlines, and the inability to do cardio 5 times a week.
Claim: I am (quite afraid)[8] to work in IB due to the “lack of supporting conditions”
Question: I am ___ to work in IB…
Not sure how to test when someone is afraid or does not want to do something because of X! Oh wait, there is a ‘because’!
C&Q:
(I might be able to do it)[1] for (a few years)[2], but not for (long)[3].
Claim: Might be able to work in IB for < 2-5 years
Question: Have you worked in “similar conditions to IB” for 2-5 years, in the past?
Example: During my IIT days, I regularly worked 6-7 days for >10 hrs easily. I had “quite some stress”, due to making mistakes in work, or not being good enough and trying to show that I am much better than I actually am. I slept at weird times and was always at work until 8 pm or even more. This happened for about 1-1.5 years.
For “similar conditions to IB”, I think of 70-100 hrs a week, not being able to do cardio every day, the need to facetime.
Claim: I might not be able to work for long at IB
Question: Have there been others who have not been able to work for 15 years?
Example: This guy moved to Private Equity within 3 years of working in IB because of poor “support conditions” mentioned above. — wallstreet oasis forum
Corollary Question: Have there been others who have been able to work for more than 15 years?
I guess I don’t have to answer the above question as main claim doesn’t say “I will never be able to work for <15 years in IB.”
C&Q:
(IB)[A] doesn’t make sense unless it is going to be done for the next (10-15 years)[B], as it takes (so much time)[C] to reach (millions)[D].
Claims: [A] for < [B], is not the best option, because it takes
[C] to reach [D]
Question: [A] for ___, is not the best option
We skip the because part!
Example: Within 15 years you are able to save only ~900 lives (based on this); not including the “personal fit””, which will probably bring the value down “further”. With joining an EAO like GiveWell it seems like you can make a contribution of 97k$ per year by working there. This seems to allow for >1000 lives over a 40 year career.
Claim: [A] for > [B] seems like one of the best options considering impact alone (not including personal fit).
Question: [A] for > __ seems like one of the best options for impact(not including personal fit).
Example: Over a 30 year career if a person earns on average 800k$ (roughly based on here) you could save ~3100 lives (>> 1000 lives at an EAO).
C&Q:
I’d rather try to get into (MC)[1], which doesn’t seem like an option where I would (necessarily burn out)[2]. I conclude that MC > (IB)[3].
Claim: MC doesn’t seem to result in burn out. There fore MC > IB.
Question: MC doesn’t seem to result in [2]. Therefore [1] __ [3]
Example: According to this quora answer of someone from McKinsey, average work hours is 60. With IB it is 70 to 100 hrs of work.
For burnout, we think of not being able to do cardio for 20 mins 5 times a week, >70 hrs work weeks, “monotonous work”.
I am not sure identifying this question is helping in anyway. I look at the claim and remove some word and there I have the question. Identifying the claim seems to be most important as I try to find example looking at it.
Mechanics (40)
Source: Mechanical Vibrations by Daniel Rixen
C&Q:
On the other hand, solving the (equilibrium equations)[1] in the (direction constrained by the kinematical conditions)[2] is not useful since, (in that direction, the trajectory is prescribed by the constraint and thus known)[3].
Claims: Solving [1] along [2], is not useful because [3]
Question: Solving [1] along __ is not useful …
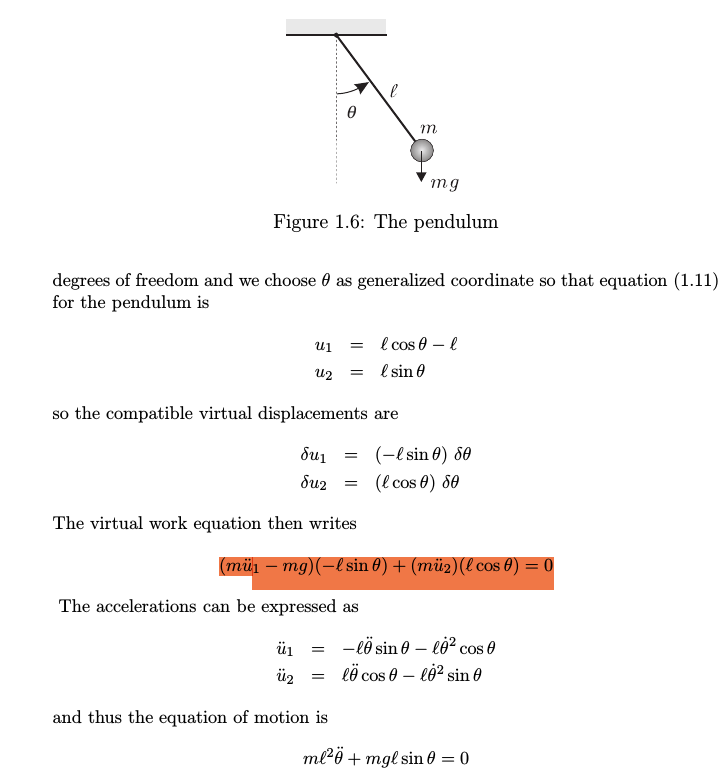
For [1] along [2], we think of the following equation along the pendulum bar.
$T = mg \sin{\theta}$
For [3], we think of the constant distance of R in the direction of the bar of the pendulum which NEVER changes.
Example: In Pg 22 of the book, there is no discussion or usage of
the $T = mg \sin{\theta}$ for the determination of the equation of
motion equation $ml^2 \ddot{\theta} + mgl \sin{\theta}=0$. Hence not
useful.
C&Q:
In the (system described in Figure 1.2)[1] (below) only the (motion along the direction tangent to the curve)[2] needs to be determined.
Claims: In [1], only [2] needs to be determined.
Questions: In [1] only __ needs to be determined
Example: In [1], the pendulum can only move along the spherical surface. That is the only motion to be determined. There is no motion along the direction of the radius of the pendulum and hence it doesn’t need to be determined.
For 1, we think of this image from the text book
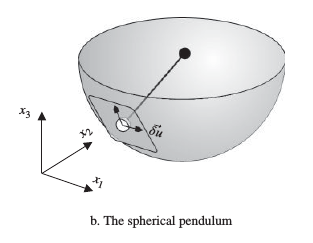
For 2, we think of the motion along the spherical surface
C&Q:
(In doing so)[1], (the reaction forces, which act in the direction normal to the curve)[2], do not participate to the (motion)[3] and thus need not be determined:
Claims: [2] is not needed for [3] because of [1]
Question: [2] is __ for [3]…
Example: On pg 22 of the book, we see the derivation for the equations of motion of a simple pendulum. We notice the complete absence of this reaction force (tension force), in the final equation (as well as the entire derivation).
For [1], we think of the system described above, where the motion is only along the spherical surface is determined
For [2], The tension forces along the bar of the pendulum.
For [3], we think of the equations of motion (1-dimension)
$ml^2 \ddot{\theta} + mgl \sin{\theta}=0$
C&Q:
the (position of the particle in the direction normal to the curve)[4] is obviously imposed by the (constraint)[5] and does not require solving the (equilibrium equation in that direction)[6].
Claims: [4] is known because of [5]
Because statement
Claims: [4] does not require solving [6]
Questions: [4] does __ solving [6]
Examples: The position of the particle normal to the parabola (along the bar of the pendulum), is always going to be the length of the pendulum. At 30 degrees the position is the length of the pendulum, at 90 degrees the position along the normal to the parabola of the pendulum path, is L. It does not require solving of ANYTHING as a result!
C&Q:
Let us therefore decide that, in the presence of (kinematical constraints)[1], we consider only (virtual displacements)[2a] δui (VD) (compatible with the constraints)[2] or, in other words, (kinematically admissible)[3].
Claims: When [1] is present, we consider [2a] only along [2].
Question: When [1] is present, we consider [2a] only along __.
Example: On Pg 22, we see that the simple pendulum, has a constraint of staying on a circle (via the bar of length L).
$u_{1} = L \cos{\theta}$
$u_{1} = L \sin{\theta}$
The coefficients extracted are:
$\delta u_1 = -l \sin{\theta} \delta \theta$
$\delta u_2 = l \cos{\theta} \delta \theta$
When you divide the coefficients Y by X, you get $-\tan(\theta)$,
which is nothing but the slope of the circle traced by the
pendulum for the current coordinate system, u1 facing down and u2
facing to the right. This shows that the virtual displacements are
along [2].
Claims: [2] is [3].
To me this looks like just a definition, So I skip!
C&Q:
(
$\sum^{3}_{i=1}(m\ddot{ui}-X_i)\delta u_i = 0$)[4] then describes the projection of the (dynamic equilibrium)[4a] in the (space compatible with the constraints)[5], namely in directions (orthogonal to unknown reaction forces)[6]. The (form (1.5))[7] thus involves only (effectively applied forces)[8] and stipulates that.
Claims: [4] describes projection of [4a] on [5]
Question: [4] describes __ of [4a] on [5]
Example: As we see below, [4] is nothing but the dot product (projection) of [4a] on [5].
For 4a, we think of equilibrium equations in X and Y
X: $(T \cos{\theta} - mg + m \ddot{u_1})$
Y: $(T \sin{\theta} - m \ddot{u_2})$
For 5, we think of $l \delta \theta$ which in X and Y direction is:
X:$u1 = -l \sin{\theta} \delta\theta$
Y: $u2 = -l \cos{\theta} \delta \theta$
For [4], we think of multiplying the equilibrium equations with virtual displacements as shown in the above picture.
$(T \cos{\theta} - mg + m \ddot{u_1}) \times (-l \sin{\theta}) + (T
\sin{\theta} - m \ddot{u_2}) (l \cos{\theta}) $
Claims: [5] is [6]
Question: [5] __ [6]
Example: The slope of the virtual displacements is
$-tan(\theta)$, which is tangent to the circle. This is orthogonal
to the Tension forces in the simple pendulum.
Claims: [7] involves only [8]
Question: [7] involves only [8]
Example:
In the example given for [4] we have:
$(T \cos{\theta} - mg + m \ddot{u_1}) \times (-l \sin{\theta}) + (T
\sin{\theta} - m \ddot{u_2}) (l \cos{\theta}) $
The tension force cancels out giving the virtual work equation in the above image:
$(- mg + m \ddot{u_1}) \times (-l \sin{\theta}) + ( - m \ddot{u_2})
(l \cos{\theta}) $.
Thus [7] above, involves force due to gravity mg and inertial terms
m \ddot{u_1} but not the reaction force T, i.e., [7], involves
only [8].
C&Q:
The (virtual work)[9] produced by the (effective forces acting on the particle)[10] during a (virtual displacement δui compatible with the constraints)[11] is equal to zero.
Claims: [9] produced by [10] along [11] is 0
Questions: [9] produced by [10] along [11] is __
Example:
For [11], we think of,
X: $u1 = -l \sin{\theta} \delta\theta$
Y: $u2 = -l \cos{\theta} \delta \theta$
For [10], we think of force due to gravity mg and inertial terms m
\ddot{u_1} but not the reaction force T.
For [9], we think of
$(T \cos{\theta} - mg + m \ddot{u_1}) \times (-l \sin{\theta}) + (T
\sin{\theta} - m \ddot{u_2}) (l \cos{\theta}) $=0
simplified to only contain the effective forces
$(- mg + m \ddot{u_1}) \times (-l \sin{\theta}) + ( - m \ddot{u_2})
(l \cos{\theta}) $ = 0
[9], produced by only [10] along [11] is thus 0.
C&Q:
Conversely,
$\sum^{3}_{i=1}(m\ddot{ui}-X_i)\delta u_i = 0$[1] indicates that If the (trajectory ui of the particle)[2] is such that the (effectively applied forces)[3] produce no (virtual work)[4] for any (virtual displacement compatible with the constraints)[5], the (equilibrium)[6] is then (satisfied)[7].
It appears that the above is nothing but what we did in the last
C&Q: , but with the “(equilibrium)[6] is then (satisfied)[7]” statement added.
This is something I came across while DPing a few articles back. I don’t know what it means to “satisfy equilibrium”. In my view, all systems are in dynamic equilibrium, i.e., everything can be written in the D’alhembert’s form. I have no example, when system is not in dynamic equilibrium. I don’t understand those final words, “equilibrium is satisfied”.
For the rest is very similar to the last C&Q so I don’t go further with it!
C&Q:
Again, the (principle of virtual work)[1] corresponds to the (projection of the equilibrium equations)[2] in the (directions compatible with the kinematical constraints)[3]. The (resulting equations)[4] are then (easier to solve)[5] since the (constraining forces are no longer unknowns)[6] for the problem.
[1],[2],[3] have been already dealt with! Moving on!
Claim: [4] is [5] because of [6]
Example: In the case of the simple pendulum the equation [4], has no reaction forces in it and hence the reaction forces doesn’t need to be solved. Now we just have to solve 1 equation ([4]) for 1 unknown ($\theta$) instead of also solving also for the reaction Forces.
For 4, we think of the following equation where we have one unknown
$\theta$
$ml^2 \ddot{\theta} + mgl \sin{\theta}=0$
For 5, we think of solving the following two equations for two
unknowns $\theta$ and $T$
X: $(T \cos{\theta} - mg - m \ddot{u_1})=0$
Y: $(T \sin{\theta} - m \ddot{u_2})=0$
where u1, u2 are functions of \theta
C&Q:
Without (kinematic constraints)[1], the (state of the system)[2] would be completely defined by the 3N (displacement components
$u_{ik}$)[3] since, starting from a (reference configuration$x_ik$)[4], they represent the (instantaneous configuration)[5]:
$$
\xi_{ik}(t) = x_{ik} + u_{ik}(x_{jk},t)
i,j=1,2,3; k = 1,...,N
$$
The (system)[6] is then said to possess 3N (degrees of freedom)[7].
Claims: Without [1], [2] is known with 3N [3] because …
Questions: Without [1], [2] is known from __ [3]
Examples: With the pendulum free to move without any bar holding it at a distance L, if the pendulum is at (2,L,3), we need 3 parameters to define its position in space. N=1 particle, implies 3N = 3 displacements:
$ux = X = 2$
$uy = Y = L$
$uz = Z = 3$
With the pendulum bar of length L, if the pendulum is at (0,L,0), then
$\theta = 90^\circ $ defines its position in the 2d case.
$ux = L \cos{\theta} = 0 $
$uy = L \sin{\theta} = L $
$uz = 0$
Claims: [4] + [3] = [5]
Questions: [4] + [3] = __
Examples: The reference configuration is say (1,1,0) for the ball. If it moves by (2,3,0), then the new current position of the ball is (3,4,0).
Claims: [6] has 3N [7]
Question: [6] has __ [7]
Examples: With the pendulum free to move without any bar holding it at distance L, it needs 3 variables to know its position (as seen above). N=1; 3N = [3].
C&Q:
In (most mechanical systems)[1], however, the (particles)[0] are submitted to (kinematic constraints)[2], which restrain their (motion)[3] and define (dependency relationships between particles)[4].
Claims: In [1], [0] is bound by [2] which restrains [3]
Question: In [1], [0] is bound by __ which restrains [3]
Example: In the double pendulum, the two balls are forced to move in a particular trajectory. Ball 1 can move in a circle given by radius L1. Ball 2 can move in a circle given by radius L2, for a given position of ball 1.
Claims: In [1], [0] is bound by [2], which defines [4]
Question: In [1], [0] is bound by __ which defines [4]
Example: We think of a double pendulum. Ball 1 can move in a circle given by radius L1 alone. Ball2, is dependent on the position of ball 1 as shown below:
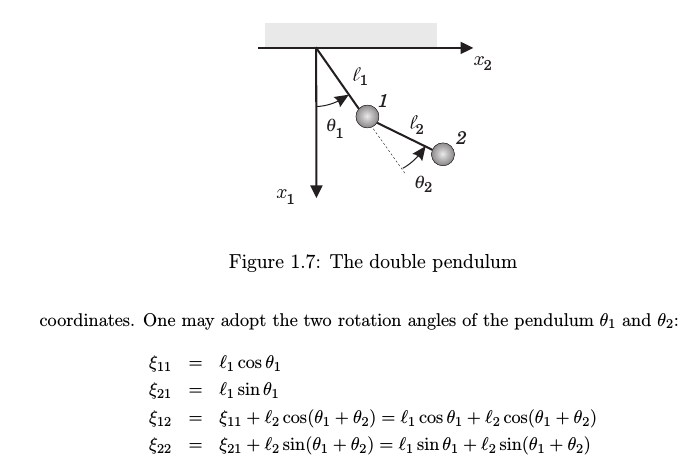
Because it says particles, I use the double pendulum example
Mechanics: non-holonomic constraints (40)
Source: Mechanical Vibrations by Daniel Rixen
C&Q:
Holonomic constraints
The (holonomic constraints)[1] are defined by (implicit relationships)[2] of type:
$$
f(\xi_{ik},t)=0
$$
If there is no (explicit dependence with respect to time)[3], the ( constraints)[4] are said to be (scleronomic)[4a]. They are (rheonomic)[4b] otherwise.
A (holonomic constraint)[6] reduces by one the number of (degrees of freedom of the system)[7].
Claims: [1] is of type $f(\xi_{ik},t)=0$
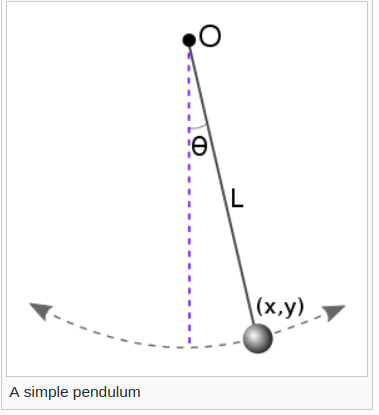
Examples: $\sqrt{x^2+y^2} - L = 0$
This is a holonomic constraint for the simple pendulum, where the
distance between the ball and the origin is given by
$\sqrt{x^2+y^2}$.
Claims: [1] is defined by [2]
Questions: [1] is defined by __ relationships
Examples:
$\sqrt{x^2+y^2} - L = 0$
Here we see that x,y & t are written on the same side of
the equation, equated to 0 (implicit).
Claims: if [3], then [4] is said to be [4a]
This claim cannot really be verified as scleronomic is a label given to something that looks a particular way
An example of the [4a] is $\sqrt{x^2+y^2} - L = 0$
Claims: If not [3], then [4] is said to be [4b]
This claim cannot be verified as well as rheonomic is just a label given to something
An example of [4b] is:
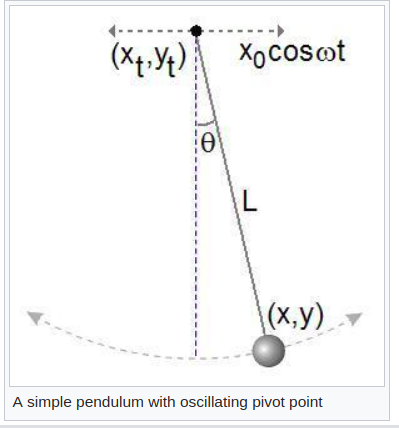
Here, the constraint is given by the following where there is also time dependence.
$\sqrt{(x-x_0 \cos{\omega t})^2 +y^2} - L =0 $
Claims: [6] reduces [7] by 1
Questions: [6] reduces [7] by __
Examples: In the 2d pendulum example, without the bar constraint
$\sqrt{x^2+y^2} - L = 0$, the pendulum ball is free to move in all
directions. This means it has 2 DOFs (x and y). With the constraint
the pendulum ball can only move in a circle and hence has only 1 DOF
($\theta$).
2-1 = 1
C&Q:
A (constraint)[1] is said to be (nonholonomic)[2] if it cannot be put in the (form (1.12))[3]. In particular, (non-holonomic constraints)[4] often take the form of (differential relationships)[5]. (Such relationships)[5*] are generally not (integrable)[6], and therefore they do not allow reduction of the (number of degrees of freedom of the system)[7].
$f (\dot{\xi}, \xi, t) = 0$
Form 1.12: [3]
$$
f(\xi_{ik},t)=0
$$
Claims: [1] is [2] if it cannot be like [3]
This is a definition-claim. The best I think I can do here I think is to give an example for [2]
For 2, we think of:
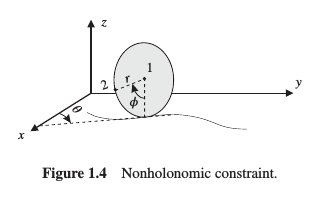
$\dot{x_1} + r \dot{\phi} \cos{\theta}=0$
$\dot{y_1} - r \dot{\phi} \sin{\theta}=0$
Here the plate is assumed to be parallel to the Z axis and that it
does not slip.
Claims: [4] “often” has [5] in it.
Question: [4] has __ relationship in it.
Example1:
$\dot{x_1} + r \dot{\phi} \cos{\theta}$
$\dot{y_1} - r \dot{\phi} \sin{\theta}$
The equations have $\dot{x_1}$ and $\dot{\phi}$ in it.
For “often” “generally”, I would think I should give atleast one more example either “for” or “against”! Your thoughts?
Claims: [4] with [5] is not “generally” [6]
Questions: [4] with [5] is __ [6]
Examples: The constraints shown below cannot be integrated as
there are two variables in one term, i.e., $\theta$ $\phi$
$\dot{x_1} + r \dot{\phi} \cos{\theta}=0$
Contrast this to $\theta$ being fixed. We are able to integrate it to:
$x_1 + r \phi \cos{\theta_{fixed}} = 0$ i.e., a holonomic constraint.
Example2: The constraints shown below CAN be integrated although they seem to be in the non-holonomic form.
$\dot{x_0}+\dot{y_0} = 0$
Upon closer examination, once integrated they turn out to be holonomic constraints. I guess as a result this is not a non-holonomic constraint and non-holonomic constraints must not be integrable.
Claims: [4] with [5] are generally [6] and therefore does not reduce [7]
Questions: [4] with [5] are generally not [6] and therefore does not __ [7]
Example1:
We need 8 variables to know the position of the plate in the co-ordinate system (DOFs):
$x1, y1, z1, x2, y2, z2, \phi, \theta$
The following are the non-holonomic constraints:
$\dot{x_1} + r \dot{\phi} \cos{\theta}$
$\dot{y_1} - r \dot{\phi} \sin{\theta}$
The following are the holonomic constraints:
$x2-x1 = r \sin{\phi} \cos{\theta}$
$y2-y1 = r \sin{\phi} \sin{\theta}$
$z2-z1 = -r \cos{\phi}$
$z1 = r$
With holonomic constraints just by simple substitution we reduce the DOFs by 1 for each constraint. So we now have 4 dofs (8-4). The two non-holonomic constraints seem to not reduce the DOF’s!
Initial DOFs: 8 Holonomic constraints: 4 non-holonomic constraints: 2 Final Dofs: 4 (8-4)
Example2: With the moving origin of a pendulum example,
$\dot{x_0}+\dot{y_0} = 0$ can be reduced to $x_0 + y0 = constant$
by integration; With an initial condition this constant will be
known. This is nothing but is in the form of holonomic constraint.
Initial DOFS: 3 ($\theta$, x0,y0) holonomic constraint disguised as a non-holonomic constraint: 1 Final DOFS after constraint: 2 ($\theta$ & x0)
This took me 2 hrs for the last 8 phrases. Man puzzling out takes time, but I seem to understand the word integrate and it’s relation to holonomic constraints. I remember seeing the word integrate and thinking at the beginning, ah I am fucked! Indeed, I felt fucked but I think I swam out. Please give feedback on how unclear the above is for a reader like you and what I can do to make it easier for your eyes!
C&Q:
If R (holonomic kinematic constraints)[1] exist between the 3N (displacement components of the system)[2], the (number of degrees of freedom)[3] is then reduced to (3N − R)[4]. It is then necessary to define n = 3N − R (configuration parameters)[5], or (generalized coordinates)[6], denoted (q1 , … , qn ) in terms of which the (displacements of the system particles)[7] are expressed in the form:
$u(x_{jk},t) = U_{ik}(q_1, q_2..., q_n,t))$
Claim: If R of [1] exist between 3N of [2], then [3] is reduced to [4].
Question: If R of [1] exist between 3N of [2], then [3] is reduced to __.
Example: Take a double pendulum.
No: of holonomic constraints: 2 [1] No: of displacement components: 2*2 (3N is 2N in 2D) [2] No: of DOFs: 4-2 = 2 [3,4]
With $\theta_1$ we know the position of the first ball. With
$\theta_2$ we know the position of the second ball as well.
Claim: It is necessary to define [5] or [6] such that [7] are of the form shown.
$u(x_{jk},t) = U_{ik}(q_1, q_2..., q_n,t))$
Question: It is __ to define [5] or [6] such that [7] are of the form shown.
Example: Pg22, derivation, shows writing the displacements $u_1,
u_2$ in $\theta$ allows for the derivation of 1 motion equation. If
we keep it as $u_1$ and $u_2$, then we have 2 motion
equations. Hence making it necessary to write it in $\theta$ which
will reduce to [1] equation, [1] unknown.
For [5] or [6] we think about the pendulum example, where variable $\theta$
defines the position of the system.
For [7] we think of $u_1=L\cos{\theta}$ and $u_2=L\sin{\theta}$
C&Q:
When only (holonomic constraints)[1] are applied to the (system)[2], the (generalized coordinates qs)[3] remain (independent)[4] and may be varied in (an arbitrary manner without violating the kinematic constraints)[5]. The (virtual displacements
$δu_{ik}$compatible with the holonomic constraints)[6] may be expressed in the (form)[7]:
$\delta u_{ik} = \sum_{s=1}^{n} \frac{\partial U_{ik}}{\partial q_s}
\delta q_s$
Claim: When only [1] is applied to [2], [3] remains [4].
Question: When only [1] is applied to [2], [3] remains __
Example: In the simple pendulum example, once the pendulum bar is
connected to the pendulum ball (constraint), then $theta$ is the
variable that does not depend on anything.
The displacements in X and Y depend on $\theta$, but \theta does not
depend on anything.
$u_1 = L \cos{\theta}$
$u_2 = L \sin{\theta}$
For [1] we think of
$\sqrt{u_1^2+u_2^2} - L = 0$
For [2], we think of the simple pendulum
For [3] we think of $\theta$
I realize later that my interpretation of independent is wrong
Claim: When [1] is applied to [2], [3] may be varied in [5].
Question: When [1] is applied to [2], [3] may be varied in __
Example:
I still do not understand this “varying of displacement in an arbitrary manner”, How varying the displacement in an arbitrary manner brings about virtual displacement is still not understood. This was also something I didn’t understand when I did the DP exercise a few times back.
So we skip this for now!
Claim: [6] is expressed as [7]
Question: [6] is expressed as __
Example: As part of the derivation on pg 22 we see that,
$u_{11} = L \cos{\theta}$
$u_{12} = L \sin{\theta}$
From which we get in the form of [7]. Here s=1, n=1, k=1; Therefore:
$\delta u_11 = -l \sin{\theta}\ \delta \theta $
$\delta u_12 = l \cos{\theta}\ \delta \theta $
C&Q:
The (coefficients
$\frac{\partial U_{ik}}{\partial q_s}$)[1] define the (displacement directions of mass k)[1a] when the (generalized coordinate $q_s$)[2] is varied. The (variations δqs)[3] are (totally independent by definition)[4], meaning that they can be chosen arbitrarily without violating any (kinematic constraint)[5]. The (identity (1.16))[6] being satisfied for any (virtual displacement)[7], it follows that (each associated term in the virtual work (1.16) principal)[8] must be zero. (These terms)[9] correspond to the (equilibrium projected onto the direction of the generalized coordinate qs)[10].
Identity 1.16:
$\sum_{s=1}^n (\sum_{k=1}^N \sum_{i=1}^3 (m_k \ddot{u_{ik}} - X_{ik}) \frac{\partial U_{ik}}{\partial q_s} ) \delta q_s=0$
Claim: [1] is [1a] when [2] is varied.
Question: [1] is __ when [2] is varied.
Example: In the simple pendulum example, when $\theta$ is “varied”
we get,
$\delta u_{11} = -l \sin{\theta}\ \delta \theta $
$\delta u_{12} = l \cos{\theta}\ \delta \theta $
from the displacements,
$u_{11} = L \cos{\theta}$
$u_{12} = L \sin{\theta}$
The coefficients extracted are:
in Y: $-l \sin{\theta}$
in X: $ l \cos{\theta}$
When you divide the coefficients Y by X, you get $-\tan(\theta)$,
which is nothing but the slope of the circle traced by the
pendulum for the current coordinate system, u1 facing down and u2
facing to the right.
I thought I knew what the displacement direction of mass means! When I tried to explain I stunk! My explanation didn’t make any sense. After a while I have an explanation.
Claim: [3] can be chosen arbitrarily without violating [5]
Not sure what “arbitrarily chosen” means. This is something that I have encountered in the beginning of the this section as well.
Claim: [4] implies that [3] can be chosen arbitrarily without violating [5]
This is a definition.
Claim: [6] is 0 for any [7]
Question: [6] is __ for any [7].
What does “any virtual displacement” even mean, can’t think of an example for this!?
Claim: [8] is [10]
Question: __ term in identity 1.16 is [10]
Example:
[8] is without the reaction forces
We know the equilibrium equations for the simple pendulum from before,
X: $(T \cos{\theta} - mg + m \ddot{u_1}) = 0$
Y: $(T \sin{\theta} - m \ddot{u_2}) = 0$
The above equilibrium is multiplied by the direction of generalized coordinates
$(T \cos{\theta} - mg + m \ddot{u_1}) \times (-l \sin{\theta}) = 0$
$ (T \sin{\theta} - m \ddot{u_2}) (l \cos{\theta}) = 0$
We continue to have the equation = 0; here n=1, N=1, i varies 1..2.
The above is the exact term referred by [8].
Claim: [8] is 0
Question: [8] is __
Example: From the previous example, we see that [8] is indeed 0
Career research - Analysis continued (42)
Source: From the Summary I wrote for my career analysis.
C&Q:
(CC wise)[1], (DE)[2] appears to give little or no support to the (career ambitions I have)[3], such as, to go into (EAO’s in management or analyst roles)[4]. (It’s)[2] also not good for (ETG)[5]. (DS)[6] seems like a (clear winner)[7] when compared to (DE)[2] as it does (more than DE)[8] and (aides in going towards DW)[9]. So, (DS)[6] > (DE)[2].
CC - Career Capital, DE - Design Engineering, DS - Data Science
Claim: [2] does not support [3], considering [1].
Question: [2] does not support [3] considering __.
Example: With working as a design engineer, skills like statistics are very rarely used during my work and hence not learnt. These are the skills that seem to be required for EAO’s like GiveWell.
For [1], we think of skills such as statistics, managing an organization/team.
For [2], we think of working in the lithography industry as a design engineer for the next 5-10 years.
For [3], we think of working in an EAO like GiveWell or 80000 hrs in the roles of management or analyst.
Claim: [2] is not good for [5].
Question: Salary for [2] __ Salary for [6].
Example:
Mechanical Design engineer jobs in the KLA San Francisco: 119k avg salary
Data Scientist in Facebook California: 150k avg salary
Friend in KLA California earns 100k in a similar to Mechanical Designer role in KLA, whereas friend in Apple earns at ~150k as a Data Scientist.
Claim: [6] “seems like” [7] w.r.t [2] considering [8]. i.e., [6]>[2].
Question: [6] __ [2] considering [8]
Example:
DS at Facebook gives “more skills” in statistics and more salary, than DE at ASML and hence is a better choice.
Claim: [6] “seems like” [7] w.r.t [2] considering [9].
Question: [6] __ [2] considering [9].
Example:
DS at Facebook involves a “lot more statistics” than DE in ASML/KLA, which is needed at EAO’s like GiveWell.
I suspect you are going to say this is not an example! If so, then the example I would need to come up with is something like, A did DS and went to GiveWell, and B did DE and didn’t go to GiveWell. But such examples are hard to find right?
For [7], we think of performing linear regression analysis with multiple variables everyday as a DS than once in a 3 months as a DE.
For [9], we think of working in GiveWell.
C&Q:
Although (Starting-up)[1] has (unbelievable potential for impact)[2], and (pretty good CC)[3], it still (sucks as an option)[4] because of the (very poor personal fit)[5]. In case (great potential)[6] is foreseen in (some startup idea)[7] or there is an option to (join a startup)[8], an (evaluation of current options)[9] must be done then. (Starting-up)[10] is (not for me now)[11].
Claim: [1] has [2].
Question: Does [1] have [2]?
Example: According to 80000 hrs, founders from the first 5 years of Y Combinator are now worth 18 million after 5-9 years. If 50% is donated this would mean a savings of 1800 lives at 5k$ per life. Contrast this to DE Netherlands, where you could save about 200 lives over a 40 year career! JFC!
Claim: [1] is [3].
Question: Does [1] have [3]?
Example: I don’t know.
For “pretty good” we think of ???
For “CC” we think of ???
“pretty good” compared to what?
I think I maybe get your frustration on using “CC” now. The definition of CC is so broad, everything could be good CC, unless, you look at impact. For example, DS is “good CC”, as it gives skills in statistics. Starting up gives “good CC” even if you fail as you have “management skills”. These are absolutely useless statements, as there is no number associated with it. Ultimately the only thing we care about is IMPACT. I would rather, ‘DS allows you to save N1 lives’, ‘Starting up allows you to save N2 lives when you fail’. It was painful to think of examples and struggle with WORDS, LABELS and definitions! Am I wrong?*
This would mean to not deal with these words at all anymore?
And please do call out such words, so I can rid them off my dictionary as well!
Claim: [1] is [4] because of [5].
Question: Is [1], [4] because of [5]?
Example: The effective impact is obtained by multiplying the chance of success with potential impact.
With startups the chance of success for me currently as calculated
here (in the “founding startup” section), is 0.03%, i.e., the
effective impact is 0.03%*1800 lives = 0.54 lives over a lifetime.
Claim: if [6] is seen in [7] then [9] must be done.
Question: if [6] is seen in [7] then [9] __ be done.
Example: In case we come across a startup idea like AirBnb, i.e., one that has never been done before and if scaled all over the world can make a lot of money, evaluating your options as shown by 80k hours.
I don’t have an example, but it “seems like a good thing to do”. It’s still a claim. I agree. What should I do in these cases?
Claim: if [6] is seen in [8] then [9] must be done.
Question: If [6] is seen in [8] the [9] must be done.
Same as above!
Claim: [10] is [11].
Question: Is [10], [11]?
Example: if you look at my current personal fit, it is at 0.03% leading to an expected value of 0.54 lives saved per lifetime. If I continue working where I do right now as a DE, I am guaranteed to save >100 lives.
C&Q:
An (Economics PhD)[1] shall be done for either (getting into academia)[2] or getting into (places like government institutions where you might rarely get a chance to change many lives)[3]. The (effective impact)[4] of a (career in academia)[2] is estimated as (624 lives)[6], where as the (maximum impact of a tenure track position)[7] is (582 (which is <624) lives)[8]. This implies that the (failure paths chosen in the decision tree)[9] have (probably much higher impact)[10] (which is also the case)[11].
Claim: [1] is done for [2].
Question: Is [1] needed for [2]?
Example:
Unfortunately, when I looked at MITs Poverty Action Lab, they seemed to want in their requirements masters and bachelors in economics with X years of experience. I didn’t find PhD requirements except for 1 position of post-doctorate. Also Robin Hanson’s interview here seems like labels after labels. So I am really not sure, if Econ PhD is the right one for getting into places like MITs Poverty Action Lab (or “similar”).
I am not sure what kind of impact these boys in “academia can have” especially because of an Econ Phd.
For [2], we think of getting into academia like the “MITs Poverty Action Lab, for ending extreme poverty” and gaining XXX $ of impact.
Claim: [1] is done for [3].
Question: Is [1] done for [3]?
Example: we think of this blog post’s owner, who informs about his job in the government and how he had an impact of saving 400 lives once in his career in addition to donations that he makes.
Claim: [4] in [2] is [6].
Question: [4] in [2] is __.
Example: Effective impact calculation that I have done earlier was based on some extrapolation, and I didn’t spend too much time into it as I knew I was not going to take it up any way.
I would assume the impact is similar to an EAO like 80khours i.e., ~1k lives saved over a 40 year career. With Econ PhD, I guess it is like a 30 year career only due to the long study time.
The effective impact would reduce as a result of my “poor personal fit” with being able to do an Econ PhD. When I input it here, I get a value of 640 lives. Close to [6].
Claim: [7] is [8].
Question: Is [7], [8]?
Example: Pursuing a tenure track will cut another 7-11 years from your life where you can cause impact. Resulting in lower impact than working in say MIT’s Poverty Action Lab. Assuming of course, that the tenure track in academia will have the same impact as working at EAOs ~1k lives per 40 years of work.
Claim: [9] has [10].
I skip this, as 9 doesn’t make sense any more.
Really bad writing!
11 also skipped for similar reasons!
C&Q:
Also, compared to (DS for DW)[1] this (career path is not good)[2], looking at (personal fit)[3] as well as (impact)[4]. If I take up this career, I see myself loosing up to (10 years from now)[5] before finishing my PhD. There is a (very good chance)[6] that I don’t make the (tenure track)[7] but still get into (academia)[8]. This could easily (set me back another decade)[9] before I (start my real contribution in academia)[10], (further reducing the impact)[11].
Claim: DS for DW > Economics PhD considering [3].
Question: DS for DW __ Economics PhD considering [3].
Example: Based on the fact that I didn’t get top 20 for my masters in the US, I think it is axiomatic that I don’t have credentials for top 20 in Economics PhD. I probably need to spend 3-5 years working my way up from ground 0 in economics before I am top 20 worthy.
Whereas with DS, I personally know several engineers who studied similar to my degree, who went to DS after a masters.
In the meanwhile, since I have 5 years before I make the official jump to EAO, I have plenty of time to do Deliberate Practice and beef up my statistics game. Hence I claim that Personal fit is “much better” for DS for DW than Economics PhD.
For [1], we think of working in DS in Google for 5 years, and then moving to EAO’s like GiveWell.
For Econ PhD, we think of getting into the top 20 colleges to do a PhD
Claim: DS for DW > Economics PhD considering impact
Question: DS for DW __ Economics PhD considering impact
Example: Based on Alleged Wisdom, it appears that there is a chance of making an impact as large as 400 lives once in your life. In addition to this with a salary starting at 108k, it would in total be possible to save 750 lives.
With working an an EAO like GiveWell, it should be possible to save 1k lives.
Claim: It will take [5] before finishing PhD
Question: It will take __ before finishing PhD
Example: Based on this the initial prepping for Economics PhD will take 3 years atleast! An econ PhD takes 5-7 years. In total 10 years.
Claim: <5% chance that I make [7]
Question: __ % chance that I make [7].
Example: *Unable to find any links that gives stats comparing tenure and non-tenure. * Claim: >50% chance that I go into [8].
Question: __ % chance that I go into [8].
Example: This link suggests that academic positions were >55% of all the employments of Econ PhDs for 2012
Claim: Lack of [7] leads to [9] before [10]
Question: Lack of [7], leads to __ before [10].
Example: I only have Robin Hanson’s word for it! Also he does not say that absence of tenure track is pointless to work, he only says that if the research you need to do is not in the direction for positive impact only then we may want to spend time to get tenure track
Claim: Lack of [7] leads to [11]
Question: Lack of [7] leads to __
Example: If I spend 10 years for studying, and another 10 years to get tenure track, I will have another 20 years to work. Where as if I start with tenure track after 10 years of studying, then I have 30 years of contribution still left.
I know this whole series above of [10] phrases is with no proper examples. Only while I write this I see how I am lacking. Only when someone asked me for examples am I thinking that maybe what I am guessing could be wrong. For example, I have no resources with me how hard it is to get tenure track, other than “it is HARD”.
80k hours CC (15)
Source: https://80000hours.org/career-guide/career-capital/
C&Q:
So we’ve seen (what career capital is)[1] and (why it’s important)[2]. But (how do you get it)[3]? Here’s a (list of paths that we’ve found)[4] are often good for (gaining flexible career capital early on)[5]. Note down any that could be a good fit for you.
Claim: We’ve seen [1] in the article referred.
Question: We __ seen [1] in the article referred.
Example: In the article referred above, “CC” is described and there is atleast one example of what it is.
For [1], we think of Rob Mather working in Sales and Marketing (building skills), before he started AMF (where he claims the skills gained earlier were “useful”)
Claim: We’ve seen [2].
Question: We __ seen [2].
Example: In the article referred above, we have seen that Kate went to work at a non-profit directly after university. She couldn’t advance further and returned back to the corporate sector for more training and building useful skills. Instead if she had gone to the corporate sector directly, she would have ended up much ahead with more skills.
You are probably cringing at “more skills” “advance further”, etc… Forgive me I wanted to take an example from 80k and this is the only one I found where focusing and not focusing on “CC” were contrasted-ish
Claim: (Working at a growing organization that has a reputation for high performance)[4] is good for [5].
Question: Working at a growing organization that has a reputation for high performance is __ for [5].
Example: Peter works for a startup that makes credit models to make personal loans cheaper. Here Peter is learning to program, as well as learning about business and finance as well.
For [4], we think of working at a growing organization that has a reputation for high performance like any startup, where you take on many tasks and gain generic skill in many fields. (Exhibit Peter: skills in programming, business and finance).
For [5], we think of Peter gaining skills in programming, business and finance.
Good flexible CC! SST???
The last [5] phrases took 78 minutes. I suspect it is because of the fuzzy words like Career Capital. Don’t even get me started on Flexible CC.
C&Q:
Work at a growing organization that has a reputation for high performance
(Rob Mather)[1] is the (founder)[2] of (Against Malaria Foundation)[3], which (GiveWell)[4] rates as the (most cost-effective)[5], (proven)[6] and (well-run)[7] (international development charity in the world (as of 2016))[8]. But he started his career in (sales and management consulting)[9]. He says (these positions)[9] gave him (the management and persuasion skills)[10] he used to make AMF (so lean and efficient)[11].
Claim: [1] is the founder of [3].
Question: [1] is the __ of [3].
Example: https://www.againstmalaria.com/People.aspx
Claim: [4] rates [3] as [5] [8].
Question: [4] rates [3] as __ [8].
Example: It looks like in 2016, AMF is only 0.4 as cost-effective as ‘Deworm the world’ and a few other charities. So I am not sure it is the most effective as mentioned by 80000 Hours!
For [5], we think of the cost effectiveness model made by GiveWell here.
Claim: [4] rates [3] as [6] and [7] [8].
Question: [4] rates __ as [6],[7],[8].
Example: GiveWell does rate AMF as on of the top charities people should donate to.
Claim: [1] started in [9].
Question: [1] started in ___ after university.
Example: https://www.againstmalaria.com/People.aspx
Claim: [9] gave [10].
Question: [9] gives __
Example: I don’t know what they are talking about!
Claim: [3] is [11].
Question: ___ is [11].
Example: AMF has 198 million $ in total donations in 15 years with the peaks of ~40 million in the last four years! This is achieved with 8 people being paid @ AMF and several partners and volunteers who assist for free.
Claim: [1] uses [10] he got from [9], to make [11].
Question: [1] uses [10] he got from __, to make [11].
Example: No idea of where to find evidence for an independent test of the claim
For [10], we think of funding?
For [11], we think of few people and massive savings in lives?
*Can you suggest a ‘Spectator’ for concrete thinking? #BF method *
Eliezer Yudkowsky Entanglement (14)
C&Q:
Walking along the street, your shoelaces come untied. Shortly thereafter, for some odd reason, you start believing your shoelaces are untied. Light leaves the Sun and strikes your shoelaces and bounces off; some photons enter the pupils of your eyes and strike your retina; the energy of the photons triggers neural impulses; the neural impulses are transmitted to the visual-processing areas of the brain; and there the optical information is processed and reconstructed into a 3D model that is recognized as an untied shoelace. There is a (sequence of events)[1], (a chain of cause and effect, within the world and your brain)[2], by which you end up (believing what you believe)[3]. The (final outcome of the process)[4] is a (state of mind)[5] which mirrors the (state of your actual shoelaces)[6]
Claim: [1], and [2] results in [3].
Question: [1] and [2] result in __
Example:
Walking along the street, your shoelaces come untied. Shortly thereafter, for some odd reason, you start believing your shoelaces are untied. Light leaves the Sun and strikes your shoelaces and bounces off; some photons enter the pupils of your eyes and strike your retina; the energy of the photons triggers neural impulses; the neural impulses are transmitted to the visual-processing areas of the brain; and there the optical information is processed and reconstructed into a 3D model that is recognized as an untied shoelace.
For [1], we think of ‘light leaving the sun and striking your shoelace’, ‘photons enter the pupil of your eyes’, etc… ending with ‘the brain ‘
For [2], we think of ‘light striking the shoelace’ and then reaching your pupil, where the information is processed by the brain to make it a 3D model that is recognized as an untied shoelace.
For [3], we think of believing that shoelaces are untied
Claim: [4] is [5]
Question: _____ is [5]==[6].
Example: Light leaves the sun and hits an untied shoelace and then reaches the pupil of the eye. The brain then processes it and spits out the 3d model in the end, which is recognized as an untied shoelace.
For [5], we think of recognizing the 3d model generated in our brain as an untied shoelace
C&Q:
What is (evidence)[1]? (It)[1] is an (event entangled)[3a], by (links of cause and effect)[2], with (whatever you want to know about)[3]. If the (target of your inquiry is your shoelaces)[4], for example, then the (light entering your pupils)[5a] is (evidence entangled with your shoelaces)[5]. This should not be confused with the (technical sense of “entanglement” used in physics)[6]—here I’m just talking about “entanglement” in the sense of (two things that end up in correlated states)[7] because of (the links of cause and effect between them)[8].
Claim: [1] is [3a] with [3], by [2].
Question: __ is [3a] with [3], by [2].
Example:
definition
3a with [3], by [2]
light entering the pupil is the event entangled with shoelaces, by links of cause and effects such as (‘light falling on the shoelaces’ leading to ‘light reflecting off the shoelaces’ etc…)
For [3a] with [3], we think of ‘light entering your pupil’ being the event entangled with shoelaces.
For [3], we think of shoelaces.
Claim: if [4], then [5a] is [5].
also an example for the previous claim. No need to explain this.
Claim: [5] != [6].
Question: [5] __ [6].
Example:
For [5], we think of “light entering the pupil”
For [6], we think of “subatomic particle decays into an entangled pair of other particles” — Wikipedia.
[5] != [6].
Claim: [7] because of [8].
Question: __ because of [8].
Example: because
Work: BM with springs(26)
My GL did some cool work and sent it out to everybody. This being related to control and dynamics, I had a hard time understanding it. So I started to look at his claims one by one, started putting numbers, cleared one by one and went all the way till the end to see if they held water. In the end I had 2 questions and was able to discuss with him on “his level” about what he had written and what my questions were aka what I didn’t understand. I felt happy. Atleast as soon as I started pulling some numbers from the text 50 N/mm etc… life started to become better. I need to do this on more and more on more documents at work. The first time I read it, I knew I was just reading labels. No understanding, because I didn’t paint a picture in my head with #examples, I guess. Isolate and tackle and identify what exactly you didn’t understand or so I thought!
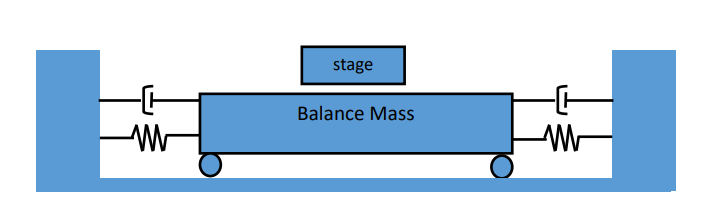
Context for reader:
The stage has coils and the balance mass has magnets in it. With current in the coils it creates a force on the stage and the BM (balance mass). The stage needs to move 150mm and the balance mass which is 5 times as heavy will move only 30mm. Initially there were no springs but motors to bring back the balance mass to the center, once in 10 days (in case it drifted away). This was an investigation by GL about this. And I had to understand what they were saying.
C&Q:
What if we replace the Drift motors by simple springs with damping?
Consequence 1 Obvious: (Force)[1] will be exerted on the (outer frame)[2]. But the (magnitude of this force)[3] is (small)[4]:(maximal the amount of force needed by the balance mass motors)[5] otherwise. The (force)[6] scales with the (displacement of the balance mass)[7], which is a (double integrator of the applied force to the stage)[8]. (This force)[9] thus only has (low frequent components)[10].
Claim: [1] is exerted on [2].
Question: __ is exerted on [2] because of the presence of springs.
Example: When the stage moves from 0 to 150mm to the right, the balance mass moves 30mm to the left. This results in a spring compression of 30mm. Assuming a stiffness of 50N per 30 mm (based on another document), we see that there will be a force of 50N on the frame.
Claim: [3] is [5].
Question: [3] __ [5].
Example: The documentation suggests that with drift motors 50 N of force will be on the frame and this is fine. With the spring of stiffness 50N per 30mm, we should have the same force on the frame.
Claim: [3] is [4].
Question: [3] is __.
Example: [3] will be 50N force on the frame which is allowed when using the drift motors and hence it shall be allowed when we use springs. Hence it is “small” aka acceptable.
Claim: [6] increases with [7].
Question: [6] increases, [7] _____
Example: It is a spring, so this is expected. If the spring compresses 30mm, then we have a force of 50 N. If the spring compresses 15mm, then only a force of 25N is experienced on the outer frame.
Claim: [6] increasing with [7], is [8].
Question: [6] increasing with [7], __ [8].
Example: No idea what [8] means. It is not my area
Claim: Due to [8], [9] results in [10].
Question: Due to [8], [9], results in __.
Example: I don’t understand [8] yet, so not able to comment on [10]. Also what is “low frequency”, I don’t know. I imagine it is something that the controller can handle with ease based on its “bandwidth”
C&Q:
Consequence 2 Using (low spring constant)[1] keeps the BM in the (center of the range)[2a] with a large (time constant)[2]. So even with the stage at (one extreme position)[3], the balance mass will (move slowly back to the center)[4]. (Moving the stage from that extreme position to the opposite extreme position)[5] will result in( movement of the Balance Mass twice the amount as when the stage would move from the center to that same extreme position)[6]. So another consequence is: (twice the movement range of the balance mass)[7] is (needed)[8].
Claim: [1] keeps BM in [2a] with large [2].
Question: [1] keeps BM, in [2a] with __ [2].
Example:
For [1], we think about 50N per 30 mm. This brings the BM back to the center in 1s (time constant). Is this large? I think it is. This essentially will provide an oscillation of <1Hz which can easily be matched by a controller to keep the stage in the same position within 0.5um accuracy.
Claim: If stage at [3], BM will [4].
Question: If stage at [3], the BM will __ move back to center.
Example: When the stage is moved by 150mm from the center, the balance mass will move by by 30mm. It will come back to 0 mm within 1s and will oscillate with <1Hz. This is slow enough, for the controller to keep the stage in the same position within 0.5um accuracy.
Claim: [5], will result in [6].
Question: [5] will result in __
Example: Moving the stage by 150mm takes it to the extreme position with the BM moved by 30mm. We hold the stage there but the BM drifts towards the center. Now when we want to move the Stage to -150mm, then the BM will need to move -60mm.
Claim: [7] is needed.
Question: [7] is __
Example: With the drift motor there is space needed only to move by 30 mm each side. Due to the springs added, we see in the above example that we will “need” 2x BM movement. Well!
The 2x need not be necessary based on the actual scenarios. I do not know the actual scenarios. If the stage stays at the extreme position only for 0.1s, then the BM drifts 5mm in 0.1s. This means the BM will need to move by 5 mm extra if the stage moves from one extreme to the other, if the stage stays at the extreme position for > 1s, then we need 2x range for the BM for sure. For now we assume 2x is needed with springs!
C&Q:
Consequence 3 In case the (balance mass is combined with the motor Yoke (like it’s the case for the XBeam)[1], the (extra range of movement needed for the balance mass)[2] translates into the (requirement for a longer Yoke)[3]. The (extra length needed equals)[4] the (extra movement range of the balance mass)[5]. Taking (consequence 2 & 3)[6a] together, the (total extra space)[6] needed in order to( replace a BM motor by a spring)[7] is 2x the (original movement range of the BM)[8].
Claim: if [1], [2] implies longer [3].
Question: if [1], [2] implies __ [3].
Example: The current yoke is such that there is 5mm before the coil runs out of the magnets when the stage is in the extreme position. This is used for tolerances like machining etc… To accommodate the spring-design we need +-60mm instead of +-30mm (current). This means that the Yoke has to be increased by +- 30mm (60mm total) atleast to ensure that the continuous force of the actuator is constant (280N +- 1N) so that there are no “problems for the controller”.
Claim: [4] == [5].
Question: [4] __ [5].
Example: To accommodate the spring we need +-60mm instead of +-30mm (current). This means that the Yoke has to be increased by 60mm atleast to ensure that the continuous force of the actuator is 280N +- 1N so that there are no “problems for the controller”.
Claim: Considering [6a], [6] needed for [7], is 2x of [8].
Question: Considering [6a], [6] needed for [7] is __ of [8].
Example: As seen above we need +-60mm of BM travel. Currently we have 30mm of BM travel. 60\/30 = 2
Statistics
Total days:10 (With three holidays)
Total time: 43.5 hrs
Total DP time: 36.4 hrs
Total time on editing:4.8 hrs
Total time on other things: 7.1 hrs
Total Phrases:208
Total Words:9350
Avg time per day: 4.3 hrs per day! Avg DP time per day: 3.6 hrs per day! Avg Phrases per hr: 5.71 Max time per day: 6.9 hrs on Saturday!
Day 1: Monday – 3.6 hrs (holiday)
Day 2: Tuesday – 2.8 hrs (no gym)
Day 3: Wednesday – 4.2 hrs (gym)
Day 4: Thursday – 4.1 hrs (gym cardio)
Day 5: Friday – 1.9 hrs (no gym but traveling long to work)
Day 6: Saturday – 6.9 hrs (holiday)
Slept for 1hr
Day 7: Sunday – 5.7 hrs (holiday)
Slept for 1 hr and played ball and watched 2 hrs of movies
Day 8: Monday – 3.6 hrs (gym)
Day 9: Tuesday – 3.5 hrs (no gym)
Slept 20 mins
Day 10: Wednesday – 5.5 hrs (no gym)
Slept 20 mins; only editing and formatting.
Other:
P.S
All work was done at home and not at the library. Just feeling lazy and it takes ~30 mins to travel walk, go to toilet and pack the things.